
Etäisyyden mittaus
Alle etäisyyden mittaus , etäisyyden mittaus tai pituus mittaus viittaa mittaus on etäisyys kahden pisteen välillä avaruudessa suoraa tai epäsuoraa verrattuna pituusyksikköä kuten mittari . Optisia etäisyysmittaria kutsutaan myös telemetereiksi .
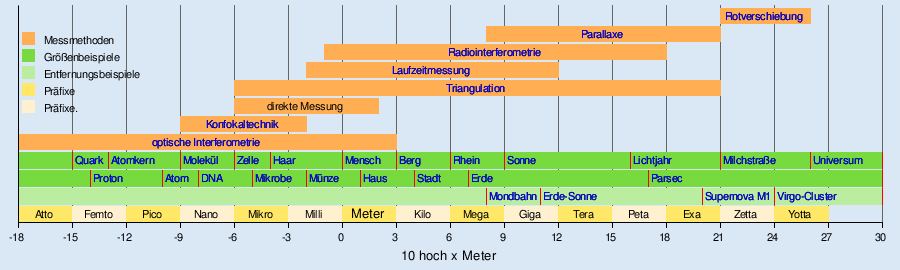
Mahdollisten pituudet alkaa ns Planckin pituus on noin 10 -35 metriä. Tämä on pienin pituus, johon huone voidaan jakaa. Fysikaalisesti relevantti alue alkaa 10 -18 m, koko alkeishiukkasten , ja ulottuu 10 26 metriä. Se kattaa 44 desimaalin suuruusluokkaa - atomifysiikasta biologiaan ja tekniikkaan kaukaisimpiin galakseihin . Tämä tarkoittaa, että etäisyyksien mittaamiseen tarvitaan erittäin suuri määrä erilaisia menetelmiä.
Jos yhdistää etäisyyden ja suunnan mittaus , asema pisteiden voidaan määrittää tasossa tai Spatial koordinaatisto - katso geometria , maanmittaustoimisto , Paikannus , navigointi ja astrometria .
Seuraavassa kaaviossa esitetään yleiskatsaus yksikön kiinnityksiin pituus- ja etäisyysmittauksiin, esimerkkejä kokoluokista ja määritetään vastaavat mittausperiaatteet.
Mittausperiaatteet

Suora mittaus
Suora etäisyysmittausmuoto on ns. Suora mittaus . Tämä tarkoittaa määritettävän etäisyyden suoraa vertailua mittapuun kanssa. Tämäntyyppinen mittaus on mahdollista vain rajoitetulla pituusalueella, koska vertailua ei voida tuottaa missä tahansa koossa. Pienimmät asteikot valmistetaan litografisilla menetelmillä ja ne ovat vain muutaman mikrometrin kokoisia. Niitä voidaan käyttää kuten tavallista mittanauhaa mikroskoopin alla tai ne voidaan lukea automaattisesti optisilla laitteilla (katso lasiasteikko ). Pisimmät säännöt on valmistettu joustavasta teräsnauhasta, jonka pituus on yli 100 metriä.
Kaikki nämä standardit on lyhennetty normaalipituuteen (aiemmin alkuperäinen mittari , nykyään valon siirtoaikaa käyttävän mittarin määritelmä ). Tätä prosessia kutsutaan kalibroinniksi . Mittarin määritelmä mahdollistaa pituusmittausten maailmanlaajuisen vertailtavuuden.
Laskennalliselta kannalta suoraa etäisyysmittausta on pidettävä kaltevana osana, joka sen muuttamiseksi vaakasuoraksi edellyttää sen kaltevuuden tai korkeuskulman mittaamista .
Alla on lueteltu ja selitetty lyhyesti joitakin menetelmiä suoran etäisyyden mittaamiseksi.
Interferometria
Interferometria kanssa yhtenäinen aallot on erittäin tarkka mittaamiseksi pituus muuttuu. Tarkkuus riippuu olennaisesti käytetystä aallonpituudesta. Käytännössä käytetään valo- ja radioaaltoja. Jotta voisi mitata etäisyyksiä kanssa interferometrin , vaiheensiirtovälineet menetelmä , valkoista valoa interferometria tai conoscopic holografiaa käytetään , muun muassa . Interferometria on suora mittaustekniikka , koska määritettävää etäisyyttä verrataan käytetyn valon aallonpituuteen. Aallonpituus liittyy kansainväliseen yksikköjärjestelmään .
Konfokaalin etäisyyden mittaus
Konfokaali teknologiaa käytetään erilaisten teknisten versioiden määrittää hyvin pieniä matkoja nanometri millimetrialueella. Se perustuu syvyyden erottamisen vaikutukseen: konfokaalianturi antaa signaalin, joka on sitä suurempi, mitä lähempänä mittauskohde on optiikan polttovälitasoa. Konfokaalinen tekniikka on suora mittaus, koska se siirtää kohdetta tai optiikkaa mittauspituudella ja vertaa muutosta viiteasteikolla.
Epäsuora mittaus
Monissa tapauksissa suoraa mittausta ei voida käyttää. Jopa kun määritetään kahden saaren välinen etäisyys mantereesta, se epäonnistuu, koska nämä kaksi pistettä eivät ole käytettävissä samanaikaisesti. Epäsuorat menetelmät ovat yleisempiä ja yleensä kätevämpiä käyttää .
Kaikki epäsuorilla menetelmillä on yhteistä, että ne eivät mittaa etäisyyttä, vaan se on määrä, joka riippuu siitä - esimerkiksi, mittaamalla kulkuaika signaalin tai kaikua (laser, tutka ), suuntaan laakerin tai kirkkautta tähti . Kaikki etäisyyden muutokset mitataan myös epäsuorasti , esimerkiksi Doppler -tehosteen avulla . Epäsuorat mittaukset on kalibroitava vertaamalla niitä tunnettuihin standardeihin, jotta niitä voidaan verrata muihin mittauksiin.
Hodometria

Hodometrie , usein Englanti kuin välimatkatietojen kutsutaan, on hyvin yksinkertainen ja vanha menetelmä välillisten siirtymämittaukset, jota voidaan rajoittaa myös käyttää matkan mittaus. Kierrosten pyörän, joiden tiedetään ympärysmitta, joka on rullattu on mittaus- jaksossa lasketaan. Kierrosten lukumäärä kerrottuna kehällä antaa mitatun etäisyyden. Jokapäiväisessä elämässä tätä menetelmää käytetään esimerkiksi autojen matkamittareihin tai mittauspyöriin mittauksessa.
( Katso myös: Kaarevuusmittari , laite kaarevien reittien mittaamiseen kartoissa)
Inertiaalinen navigointi perustuu siihen tosiseikkaan, että epäyhtenäinen liike liittyy aina liikkuvan kohteen kiihtyvyyteen . Jos integroida kaikki kiihtyvyydet, että kohde on kokenut, riippuen suunnasta ajan, voidaan käyttää yksinkertaista kaavaa nopeus on yhtä kuin kiihtyvyys kertaa aika , ja etäisyys on yhtä suuri kuin nopeus kertaa aika laskea etäisyys piiriin (kaksi- kertaa numeerinen integrointi ). Tätä menetelmää käytetään kaikenlaisissa ajoneuvoissa ja lentokoneissa, jotta voidaan mitata ympäristöstä riippumaton etäisyys. Mittausvirheet kuitenkin lisääntyvät myös ajan myötä, minkä vuoksi sijaintia on vertailtava säännöllisin väliajoin muista lähteistä peräisin oleviin tietoihin.
Kolmikulmaisuus

Kolmiointia käytettiin maanmittaukseen jo muinaisina aikoina ja sitä käytetään edelleen, lukuun ottamatta teknisiä innovaatioita. Itse mittausprosessi käyttää suoria tai epäsuoria kulmamittauksia mittauspisteeseen, jos mittausalustan pituus on tiedossa. Etäisyys pohjaan voidaan laskea kahden kulman tila -asemasta.
Kolminkertaisella kulmalla tai kolmiolla pyritään haluttuun mittauspisteeseen vähintään kahdesta eri paikasta tunnetulla etäisyydellä käyttämällä teodoliittia tai toista astelevyä. Kohdepistettä P ja kaksi asentoa (1 ja 2) muodostavat kolmion, jonka kannan pituus , ja pohja kulma , ja on tunnettua. Tämän avulla voidaan laskea kaikki muut kolmion suuret. Pohjan pituus on kolmion mitta. Kolmion kolme kulmaa antavat menetelmälle nimen 'kolmio'.




Optiset etäisyysmittarit, jotka toimivat tämän periaatteen mukaisesti, ovat sattumaa ja tilakuva -etäisyysmittarit . Tätä menettelyä päinvastoin erittäin tarkan reitin, niin sanotun perushenkilöstön, päätepisteet voidaan myös kohdistaa yhdestä pisteestä. Pohjapalkki muodostaa siten tasakylkisen kolmion peruspituuden.
Optisia metrologisia menetelmiä, kuten reunaheijastus ja fotogrammetria , jotka ovat avanneet muita sovellusalueita, on lisätty.
Myös etäisyysanturit käyttävät kolmiomittauksen periaatetta (katso laserkolmiomittaus ).
Yksinkertainen tapa arvioida etäisyyksiä ilman teknisiä apuvälineitä on peukalon hyppy . Se vain olettaa, että tiedät kohdeobjektin likimääräisen koon.
Trilateraatio
Kolmilateraatiota on samanlainen prosessi kolmiomittauksen jota käytetään myös kolme kokoja kolmiota, jonka kuvaus, nimittäin puolin. Tästä voidaan puolestaan laskea kaikki muut kolmion määrittävät suuret.
Itse mittausprosessi käyttää suoria tai epäsuoria (radioteknisiä) etäisyysmittauksia mittaustekniikan kannalta kulloinkin siirtymäaikamittauksina (yksiselitteinen) tai toteutettuna lisäksi vaihevertailulla (epäselvä). Kahden pisteen spatiaalisesta sijainnista niiden etäisyys voidaan laskea kolmion geometristen suhteiden perusteella. Menetelmän päätarkoitus on määrittää mittauspisteiden avaruudellinen sijainti suhteessa toisiinsa yksinkertaisten etäisyysmittausten perusteella nopeasti ja riittävän tarkasti.
Tuntemattoman pisteen sijainnin määrittämiseksi kolmiulotteisessa avaruudessa tarvitaan neljä tunnettua pistettä, kolme tunnettua pistettä riittää pinnalla ja kaksi tunnettua pistettä riittää pitkin liikerataa . Jos on mahdollista valita useiden matemaattisesti oikeiden ratkaisujen välillä rajoitusten perusteella, tarvittavien tunnettujen pisteiden määrää voidaan vähentää käyttökelpoisten rajoitusten määrällä.
Trilateraatio on etäisyyden mittaamisen perusta esimerkiksi satelliittinavigointijärjestelmissä tai maailmanlaajuisissa satelliittinavigointijärjestelmissä . Siinä mielessä klassisen geodesian , Kolmilateraatiota ole itsenäinen maanmittaus menetelmä, mutta se on satelliitti geodesiassa (katso myös satelliitti Laser Vaihtelevat ja SECOR ).
Ajonaikainen mittaus

Kulkuaika mittaus perustuu siihen, että sähkömagneettisia ja akustisia aaltoja etenevät äärellisellä, tunnettu nopeus. Jos lähetät signaalin mitattavaan kohteeseen, josta se heijastuu, ja mittaat sinne ja takaisin kuluvan ajan, voit määrittää etäisyyden kohteeseen siirtoajasta ja signaalin etenemisnopeudesta , eli ryhmä nopeutta aalto laskea:




Mittauksiin vaikuttaa ympäristö. Jos väliaine tunkeutuu, valon nopeus pienenee verrattuna valon nopeuteen tyhjiössä . Jos materiaalin ominaisuudet ovat lämpötilasta riippuvaisia tai anisotrooppisia tentoreita, parametrien tai suunnan muutokset häiritsevät siirtymäajan mittauksia. Esimerkiksi äänen nopeus on voimakkaasti riippuvainen lämpötilasta, sähkömagneettiset aallot ovat taipuvat sähköisesti johtavia kerroksia ilmakehän .
Reitin määrittäminen on erityisen ongelmallista: vain suorat reitit tarjoavat suoran etäisyyden. Kaikki kiertoteet toissijaisten heijastimien kautta johtavat pidempiin kuljetusajoihin ja siten virheellisiin mittaustietoihin.
Esimerkkejä:
- Lepakot ja ultraääni -etäisyysanturit ja -laitteet määrittävät etäisyyden esteistä ja saalista ultraäänisignaalien avulla.
- Kaikuluotain ja luotaimen käyttö äänisignaaleja vedessä mitattu syvyys alle aluksia, etäisyyden mittaamiseksi veden alla ( sukellusveneiden ) ja paikallistamiseen kalaparviin.
- Tutkajärjestelmät käyttävät radiotaajuuspituusalueella olevia sähkömagneettisia aaltoja etäisyyksien mittaamiseen. Erotetaan pulssilaitteet suurten ja jatkuvien aaltojen tutkalaitteiden välillä lyhyillä etäisyyksillä. Katso esim. B. Etäisyysmittauslaitteet , satelliittinavigointi (esim. GPS ), aikatason reflektometria
- Myös valo soveltuu tähän menetelmään, katso Satelliittilaserväli , LIDAR , laserpistooli , elektro-optinen etäisyyden mittaus .
- Samanlaista periaatetta käytetään radionavigoinnissa (erityisesti hyperbolanavigoinnissa ), kun eri kiinteistä lähettimistä vastaanottimeen, jonka sijainti on määritettävä, aika-koordinoidulla tavalla lähetettyjen signaalien siirtoaikamuutokset muunnetaan etäisyyseroiksi.
Kromaattisen ja konfokaalin etäisyyden mittaus
Kromaattinen confocal etäisyyden mittaus käyttää dispersio valkoinen, eli spektrisesti laajakaista valo optisessa järjestelmässä määrittämiseksi välisen etäisyyden mittaus kohteen ja anturin. Mittaukseen käytetään anturivalon eri spektrikomponenttien eri polttovälejä, jotka johtuvat tarkennuslinssin hajaantumisesta.
Kapasitiivinen etäisyyden mittaus
Kahden johtavan osan välinen etäisyys voidaan määrittää niiden välisestä kapasitanssista . Tätä varten osat on eristettävä toisistaan; Kapasitanssin mittaamiseksi ne sisältyvät sähköiseen värähtelypiiriin tai rengasoskillaattoriin , jonka taajuus on herkkä kapasitanssille. Niitä käytetään laserleikkauskoneiden tarkennusasennon säätöön, nanopositiointijärjestelmien asennon säätöön ja voiman mittaamiseen .
parallaksi
Eri parallaksi menetelmiä käytetään määrittämään etäisyydet kuin laajuuden aurinkokunnan . Sanaa "parallaksi" käytetään tässä "etäisyyden" merkityksessä. Erotetaan seuraavat:
Trigonometrinen parallaksi

Trigonometrinen parallaksi on muutos näkymän suunnassa kohteeseen suhteessa taivaan taustaan, mikä johtuu maan vuotuisesta liikkeestä auringon ympäri . Trigonometrinen parallaksi perustuu kolmiomittaukseen, sen pohjapituus on maan kiertoradan halkaisija . Lisäksi puhutaan päivittäisestä parallaksista , joka johtuu maan pyörimisestä. Mitä kauempana esine on, sitä pienempi on parallaksi. Etäisyys voidaan laskea suoraan siitä:

kun etäisyys r on annettu in parsec (pc) ja parallaksi on kaari sekuntia .

Friedrich Wilhelm Bessel suoritti ensimmäisen tähtien parallaksimittauksen vuonna 1838 tähdelle 61 Cygni . Hän määritteli arvon noin 0,3 kaarisekuntia ja siten etäisyyden noin 3,3 kpl. Maata lähimmän tähden Proxima Centaurin parallaksi on 0,762 kaarisekuntia, mikä on noin 1,31 kpl. Yleensä trigonometrinen parallaksi voidaan määrittää noin 100 pc: n etäisyydelle. Nykyaikaisilla menetelmillä on kuitenkin jo mitattu muutaman millisekunnin parallakseja. Vuosien 1989 ja 1993 välillä Hipparcos -satelliitti mitasi noin 100 000 tähteä 9 magin kirkkauteen asti ja määritteli niiden parallaksit. Hän saavutti vain 0,001 kaarisekunnin virheen. Pienin parallaksi toistaiseksi (2005) voitiin määrittää, että pulsarin PSR B1508 + 55 , jossa on radioteleskooppi : se oli 0,415 milli-Kulmasekunnit (= 0,000415 Kulmasekunnit) - tämä vastaa etäisyys on noin 2400 kpl tai noin 7800 valo vuotta .
Spektroskooppinen parallaksi
Spektroskooppisella tai fotometrisellä parallaksilla ei tutkita valon suuntaa, kuten trigonometrisen parallaksin tapauksessa, vaan laatua. Tähden lämpötilan lisäksi Maalle saapuvan valon voimakkuus riippuu luonnollisesti myös etäisyydestä, mikä mahdollistaa etäisyyden mittaamisen. Suoraan havaittavan tähden kirkkaus on tietysti vain ns. Näennäinen kirkkaus m . Erittäin kirkas tähti, joka on kaukana, ja hyvin lähellä oleva tähti, joka kuitenkin loistaa vain heikosti, voivat molemmat näyttää yhtä kirkkailta maalliselle tarkkailijalle. Siksi on tarpeen määritellä absoluuttinen kirkkaus M : se vastaa näennäistä kirkkautta , joka esineellä olisi, jos se olisi täsmälleen 10 pc: n päässä maasta. Näennäisen ja absoluuttisen kirkkauden välillä on seuraava suhde:

jossa etäisyys r on annettava parsekkeina . Jos kohteen absoluuttinen kirkkaus tiedetään, etäisyys voidaan laskea välittömästi mitatusta näennäisestä kirkkaudesta. Absoluuttinen kirkkaus voidaan määrittää vertaamalla spektrejä . Mittarina käytetään tunnetun etäisyyden objektin spektriä - ts. H. spektroskooppinen parallaksi perustuu suoraan trigonometriseen parallaksiin.
Dynaaminen parallaksi
Dynaamista parallaksia käytetään visuaalisten binaaritähtien etäisyyden määrittämiseen . Tätä varten on tiedettävä polunopeus, joka voidaan määrittää spektroskooppisesti; Etäisyys voidaan nyt laskea kahden tähden välisestä näennäisestä etäisyydestä ja tähtien pyörimisjaksosta niiden massakeskuksen ympärillä .



Punainen siirtymä
Etäisyyden määrittämistä valon punaisen siirtymän avulla käytetään hyvin kaukaisiin kohteisiin, kuten galakseihin tai kvasaareihin . Näille etäisyyksille ei ole saatavilla vaihtoehtoisia mittausmenetelmiä. Punaista siirtymää varten galaksin spektrin tunnetut spektriviivat on tunnistettava ja niiden tarkat aallonpituudet mitattava. Etäisyys voidaan laskea Hubble -vakion avulla seuraavalla kaavalla:


missä ovat valon punainen siirto ja tyhjiön nopeus.

On huomattava, että Hubble -vakion arvoa ei voida vielä määrittää tarkasti ja se oli aiemmin voimakkaiden vaihtelujen kohteena. Viimeiset mittaukset antavat arvot välillä 68 ja 74 mittausmenetelmästä riippuen .

Sovellukset
Jokaiselle etäisyysalueelle tarvitaan sopivia mittauslaitteita . Seuraavassa on yhteenveto eri etäisyysmittaussovelluksista.
Etäisyyden mittaus jokapäiväisessä elämässä

Suora mittaus on yleisin etäisyysmittausmenetelmä jokapäiväisessä elämässä. Mitattavaa etäisyyttä verrataan pituusstandardin monikertaan. Tämä ei yleensä tapahdu oikealla näkyvällä alkuperäisen mittarin kopiolla , vaan halvalla ja kätevällä taittosääntöllä , mittanauhalla tai viivaimella . Näillä mittauslaitteilla voidaan määrittää pidemmätkin etäisyydet asettamalla standardit useita kertoja peräkkäin. Tämä tietysti lisää myös mittausvirhettä. Mekaanisia tarkkuusmittauslaitteita, kuten jarrusatulat tai mikrometriruuvit, käytetään hyvin pienille arkipituuksille 0,1 - 200 millimetriä . Saavuttamattomissa paikoissa z. B. välillä koneen osien, muotoaan muuttava vahaliuskat, ns plastigauges , voidaan myös käyttää.
Etäisyys ajettu
Ajomatkojen etäisyys mitataan yleensä matkamittarilla , joka määrittää etäisyyden laskemalla pyörien kierrokset. Tällaiset matkamittarit ovat yleisiä moottoriajoneuvoissa ja polkupyörissä . Menettely sisältää epätarkkuuksia jopa muutaman prosentin etäisyydestä (esim. Kuluneen auton renkaan halkaisija on hieman pienempi kuin uuden); se riittää kuitenkin yksinkertaisiin navigointi- tai polttoaineenkulutuksen laskelmiin. Niin sanottu kauhapyörä mahdollistaa tarkemmat mittaukset . Yksinkertaisia geodeettisia mittauksia varten hodometriaa harjoitellaan mittauspyörällä . Retkeilijöille on askelmittarit .
Viime aikoina GPS -pohjaiset navigointijärjestelmät, jotka voivat mitata ja tallentaa etäisyyksiä, ovat levinneet moottoriajoneuvoihin, retkeilijöihin ja pyöräilijöihin . Erikoisjärjestelmät voivat myös mitata ja tallentaa korkeusprofiileja , jotka voivat olla kiinnostuneita vuorikiipeilijöille, pyöräilijöille ja maastopyöräilijöille. Hang purjelentokone , purjelentäjien ja varjoliitimet myös käyttää tällaisia järjestelmiä.

Mitä jyrkempi matka on, sitä suurempi on todellisen reitin ja GPS -järjestelmän ilmoittaman reitin välinen ero (jälkimmäisessä käytetään termiä pseudoetäisyys ; saksalaista synonyymiä ei todennäköisesti ole vielä luotu).
Tässä on numeerinen esimerkki Pythagoraan lauseesta
- Jos , ja ovat suorakulmaisen kolmion sivujen pituudet, missä ja ovat katetuksen pituudet ja hypotenuusan pituus, sovelletaan .

Etäisyys b on 4 pituusyksikköä, etäisyys a on 3 LE. Sitten c on 5 LE pitkä. Reitti c on jyrkkä kulkutie. Navigointijärjestelmä väittää, että tienkäyttäjä on kattanut vain 4 LE: Käyttäjänsä laskennassa käyttämä kartta on tasainen; toisin sanoen se jättää huomiotta katetut korkeuserot ja siten myös polun pidentymisen (numeerisessa esimerkissä: 5 LE 4 LE: n sijasta).
valokuvaus

Vuonna valokuvaus on tarpeen säätää objektiivista oikeaan etäisyys kohteeseen. Ongelman tekniseen toteuttamiseen on useita lähestymistapoja. Optisia etäisyysmittaria käytetään usein tallennusetäisyyden määrittämiseen. Monet niistä on rakennettu suoraan etsimeen tai heijastuvat etsimen kuvaan.
Lentoetäisyydet

Kanssa tutka voi käpertyä etäisyyksien muutaman senttimetrin useita miljoonia kilometrejä mitataan, minkä vuoksi niitä käytetään usein ilmailussa. Antenni lähettää lyhyitä impulsseja taajuudella muutaman gigahertsin (10 9 Hertz ) ja mittaa ajan, kunnes heijastunut signaali kohde on vastaanotettu. Etäisyyden lisäksi voidaan mitata myös kohteen nopeus ja suunta.
Radioaaltojen sijasta käytetään myös erilaisia optisen etäisyyden mittauksia . Käytössä on salamalamppuja , laserit ja valodiodit . Esimerkkejä ovat pilven korkeuden mittaus taskulampun heijastetuilla salaman signaaleilla, laserpistooli sekä LIDAR ja laserkolmiomittaus , joka toimii myös valodiodin kanssa, jos vaatimukset ovat alhaiset.
Veden alla ja maassa
Etäisyydet veden alla määritetään yleensä ääniaalloilla , esimerkiksi kaikuluotaimen tai kaiun avulla . Maan sisäisiin seismografisiin tutkimuksiin käytetään muun muassa. Paineilmaimpulssiäänilähteet tai räjähtävät varaukset ja määrittää useiden mikrofonien käyttöajat.
Atomeja ja alkeishiukkasia
Atomit ja alkeishiukkaset täyttävät tilan nanometrin ( 10-9 metriä) alapuolella . Fyysikot määrittää koko atomien ja alkeishiukkaset avulla sironnan kokeiden tai kehittyneempiä välineitä, kuten ATOMIVOIMAMIKROSKOOPPI . Jos kuitenkin kyse on pienistä pituuden muutoksista, jopa erittäin suurilla viiteetäisyyksillä , interferometriamenetelmiä voidaan tarkentaa samassa määrin kuin GEO600 -kokeessa, ja epätarkkuus on vain 6 · 10–19 metriä viiteetäisyys 600 metriä on yksi maailman tarkimmista mittauslaitteista.
Mikro- ja nanometrialue
Näkyvän maailman on rajoitettu , jonka aallonpituus on valon . Asioita, jotka ovat pienempiä kuin noin puolet noin 0,5 mikrometrin valon aallonpituudesta, ei voida enää havaita suoraan. Suorat mittaukset voidaan kuitenkin tehdä erittäin hyvin tähän rajaan asti. Tätä tarkoitusta varten mittausmikroskooppeja käytetään pystysuoriin mittauksiin tai okulaareja sivumittauksiin sekä mikroskooppisia vaakoja , niin kutsuttuja objekti-mikrometrejä , joita verrataan suoraan kohteen kokoon.
Optinen etäisyyden mittaus tarjoaa monia eri menetelmiä, jotka ovat epäkäytännöllisiä alalla yhden mikronin ja jopa huomattavasti vähemmän. Vaihesiirto menetelmä mahdollistaa etäisyyden mittauksia jopa sadasosaa valon aallonpituus ja sitä käytetään interferometrejä tai valkoista valoa interferometrit .
Maanmittaus
Geodeettista kolmiomittausta käytetään muutaman kilometrin etäisyyksillä, kuten kansallisessa tutkimuksessa on määritettävä . Tässä kulmamittauksen tarkkuus ja vertailuasteikon pituus määrittävät saavutettavan mittaustarkkuuden. Kolmionmuotoisen verkon suhteellinen tarkkuus voi olla miljoonasosa (0,000 001) mitatusta pituudesta. Saksasta tehdyssä tutkimuksessa , joka on noin 1000 kilometriä pitkä pohjoisesta etelään, olisi näin ollen noin metrin virhe. Viiteasteikon aiheuttama skaalavirhe on kuitenkin myös otettava huomioon.
Triangulatory etäisyysanturit toimivat mukaan periaatteen laserkolmiomittauksen , jos vaatimukset ovat alhaiset, joka on valoa lähettävä diodi käytetään usein niin säteeseen.
Aurinkokunta
Hyvin suurille etäisyyksille, jotka ulottuvat maan ulkopuolelle, tähtitiede on kehittänyt suuren määrän mittausmenetelmiä, joista osa on räätälöity hyvin erityisiin sovelluksiin:
Kuun poisto


Moon on erityinen asema etäisyysmittaus joukossa taivaankappaleita aurinkokuntamme.
Kuun kiertoradan suurin puoliakseli, jonka pituus on noin 384 000 km, on ollut tiedossa vuodesta 1900 lähtien, noin vuonna 1965 arvo korjattiin 384 400 km: iin - myös satelliittigeodeesian tarkempien maanparametrien vuoksi . Pitkän aikavälin muutokset kuun kiertoradalla voidaan nyt tallentaa muutaman desimetrin tarkkuudella.
Ensimmäisen kuun laskeutumisen jälkeen vuonna 1969 etäisyys on ollut mahdollista määrittää erittäin tarkasti. Tuolloin Apollo 11: n miehistö asetti heijastimet , niin kutsutun kuun laser-etäisyysheijastimen , Mare Tranquillitatisin kuun pinnalle (katso kuva). Tämä mahdollistaa kuun etäisyyden määrittämisen muutaman senttimetrin tarkkuuteen. Tätä tarkoitusta varten maan pinnalta lähetetään lasersäde (katso kuva), joka on suunnattu juuri kuun pinnalla olevaan heijastimeen. Rakenteensa vuoksi lasersäde heijastuu täsmälleen takaisin lähettimeen. Normaalisti vain muutama fotoni , joskus jopa yksi, palaa lähetetystä signaalista ja voidaan havaita. Etäisyys voidaan tällöin määrittää tarkasti ajasta, joka kuluu lähetyksen ja heijastuneen signaalin paluun välillä.
Lisäksi heijastimen Apollo 11 operaation, neljä muuta laser peilit perustettiin myöhemmin kuun pinnalla: kaksi jonka NASA aikana Apollo 14 operaation (1971 pohjoiseen alkaen Mauro kraatterin ) ja Apollo 15 operaation (1971 itä on Hadleyn ura ). Lisäksi kaksi Neuvostoliiton Lunochod -kuun ajoneuvoa sisälsivät kumpikin laserheijastimen; Mutta toisin kuin Lunochod 2 , joka sijoitettiin vuonna 1973 miehittämättömän Luna 21 -tehtävän aikana kuun kraatterissa Le Monnierissa, Lunochod 1: n heijastin ei voinut käyttää Lunochod 1: n heijastinta osana miehittämätöntä Luna 17 -tehtävää vuosikymmeniä sen jälkeen. toiminta Mare Imbriumissa vuosina 1970/1971 valmistui Laserkaiku voidaan vastaanottaa enemmän. Maaliskuussa 2010 Luna 17 ja Lunochod 1 löydettiin lopulta Lunar Reconnaissance Orbiterin ottamista kuvista . Tämä mahdollisti myös pysäköintipaikan laskemisen: 38,2473 ° N; 325,002 ° E Luna 17: lle ja 38,32507 ° N; 324.9949 ° E Lunochodille 1. Pysäköintiasennon uudelleenlaskennan jälkeen heijastinta voidaan käyttää uudelleen. 22. huhtikuuta 2010 Apache Point Observatory suoritti lasermittaukset onnistuneesti.
Yli 35 vuoden ajan tehdyt mittaukset mahdollistivat äärimmäisen tarkan etäisyyden määrittämisen kuuhun lisäksi myös monilta muilta alueilta. Niin voisi z. Voidaan esimerkiksi määrittää, että kuu liikkuu poispäin maasta noin 3,8 cm vuodessa. Syynä tähän on vuorovesi -kitka, joka vähentää maan kulmamomenttia . Mittaamalla etäisyys tarkasti, myös gravitaatiovakion numeerinen arvo voidaan laskea erittäin tarkasti. Mittausten alusta lähtien tällä tavalla määritetyt arvot ovat eronneet vain kertoimella 10−10 . Yleisen suhteellisuusteorian pätevyys voidaan vahvistaa myös tarkilla etäisyysmittauksilla. Vuonna 2003 APOLLO (Apache Pointin observatorio Lunar Laser-alainen käyttö) on perustettu: Kun 3,5-metrinen teleskooppi on Apache Pointin observatorio vuonna New Mexico , tarkkuus kerättyjen tietojen on toistaiseksi ollut millimetrialueella vuodesta 2006.
Tutkan mittaukset
Sisäplaneettojen Mercury , Venus ja Mars sekä asteroidien osalta tähtitieteilijät voivat käyttää aktiivista lentoaikaa . Tällöin he luottavat hienostuneeseen tutkan etäisyysmittaukseen. Tämä kuitenkin epäonnistuu kauempana olevien kohteiden kanssa, koska signaalin etenemisaika on liian pitkä ja heijastunut energia on liian pieni.
Linnunrata
Aurinkokunnan ulkopuolelle ulottuvilla etäisyyksillä auttaa ensin maanmittauksessa käytetty menetelmä : kolmio , jota tähtitieteessä kutsutaan trigonometriseksi parallaksiksi . Sen avulla voidaan määrittää jopa 10 19 metrin etäisyydet. Se riittää mittaamaan Linnunradan naapurialueiden välisen etäisyyden .
Galaksit ja maailmankaikkeus
Tähtitieteilijät käyttävät fotometristä parallaksia yli yhden zetametrin (noin 100 000 valovuoden) etäisyyksillä Linnunradan ulkopuolella . Näiden menettelyjen kalibrointiin käytetään niin sanottuja " vakiokynttilöitä ". Nämä ovat tähtiä, joilla on tunnettu absoluuttinen kirkkaus , josta etäisyys voidaan sitten määrittää mittaamalla näennäinen kirkkaus . Absoluuttinen kirkkaus tunnetaan esimerkiksi kefeideistä , koska niillä on ns. Kauden ja kirkkauden suhde .
Etäisyys pallomaisista klustereista voidaan määrittää niiden värin ja kirkkauden sekä värin kirkkauskaavion avulla .
Etäisten galaksien kirkkaus voidaan arvioida käyttämällä Tully-Fisher-suhdetta , jonka avulla kirkkaus voidaan johtaa pyörimisnopeudesta. Muut vakiokynttilät ovat supernovoja .
Jotta lopulta mitata laajuus maailmankaikkeus , punasiirtymällä galaksien määritetään. Sen pinta -ala on noin 10 26 metriä.
lähteet
- ↑ "Epäsuoran tai optisen etäisyyden mittalaitteita kutsutaan etäisyysmittariksi tai etäisyysmittariksi tai telemittariksi." Werkmeister: Topografia: Opas topografiseen tallennukseen . 1. painos. Springer, Berliini 1930, ISBN 978-3-642-47322-7 , s. 11 ( rajoitettu esikatselu Google -teoshaussa).
- ↑ Dave Finley, David Aguilar: Nopein pulssinopeus galaksista, tähtitieteilijät , National Radio Astronomy Observatory, 2005 html
- ↑ Karl Stumpff , H.-H. Vogt: Fischer Lexicon Astronomy . Tarkistettu 8. painos. Fischer Taschenbuch Verlag, Frankfurt / Main 1971.
- ^ Wettzellin geodeettisen observatorion verkkosivusto BKG : Laser Ranging
- ↑ AM Abdrakhimov, AT Basilevsky: Lunokhod 1: Ensimmäisen Neuvostoliiton kulkijan asema. Laboratory for Comparative Planetology, 17. maaliskuuta 2010, käytetty 31. maaliskuuta 2010 .
- ↑ Vuosikymmeniä vanha Neuvostoliiton heijastin, joka on havaittu kuuhun ( muistio 29. huhtikuuta 2010 Internet-arkistossa )
- ↑ Venäläisiä klassisia autoja "herätetään henkiin", FAZ .
- ^ UCSD Physicsists Locate Long Lost Soviet Reflector on Moon , lunarscience.arc.nasa.gov, käytetty 29. huhtikuuta 2010.
- ↑ Kuun etäisyyden mittaaminen , LPI Bulletin, No. 72, elokuu, 1994. Online-asiakirja .
- ↑ Apache Pointin observatorion kotisivu .
kirjallisuus
- Fritz Deumlich , Rudolf Staiger: Mittaustekniikan instrumenttitiede. 9. painos. Wichmann, Heidelberg 2001, ISBN 3-87907-305-8 .
- Walter Grossmann: Kulman ja etäisyyden mittauslaitteet. de Gruyter, Berliini / New York 1983, ISBN 3-11-009601-3 .
- Karl Kraus : Fotogrammetria . de Gruyter, 2004, ISBN 3-11-017708-0 .
- Thomas Luhmann: Lähialueen fotogrammetria . Wichmann, Heidelberg 2003, ISBN 3-87907-398-8 .
- McGlone, Mikhail, Bethel (toim.): Manual of Photogrammetry. 5. painos. ASPRS, 2004, ISBN 1-57083-071-1 .
- Rudolf Sigl : Geodeettinen tähtitiede. Wichmann, Karlsruhe 1975, ISBN 3-87907-041-5 .
- Hans Zetsche: Elektroninen etäisyysmittaus. Konrad Wittwer, Stuttgart 1979, ISBN 3-87919-127-1 .